Paper at CVPR2026 accepted
We are excited to share that our latest paper "Failure Modes for Deep Learning–Based Online Mapping: How to Measure and Address Them" by Michael Hubbertz, Qi Han, Tobias Meisen has been accepted at CVPR2026.
The paper provides a detailed analysis of failure modes in deep learning online mapping. Previous works have highlighted the problem of memorization of location-specific features in training data, which leads to skewed evaluations for the standard dataset splits in commonly used autonomous driving datasets that exhibit large overlapping regions between training, validation, and testing data.
We quantify the resulting performance differences and identify a second failure mode: overfitting to known map element geometries and topologies. In our experiments, we identified this as an equally important aspect that should be considered when evaluating models and deriving dataset splits.
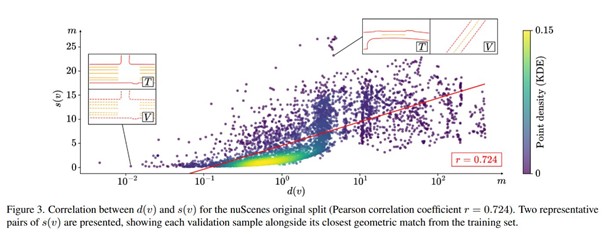
Beyond introducing novel and more truthful benchmarks for model performance, we developed a geometry-based similarity score and performed training set pruning that reduces redundancy. This led to significant performance improvements on the validation split for some splits, even though only 60–80% of the training data remained.
Looking forward to presenting and discussing these insights at CVPR 2026!