Industrial Deep Learning
In the field of "Industrial Deep Learning", we research deep learning technologies for industrial applications in order to realise innovative solutions in production, logistics and the environment. We combine basic AI research with industrial practice and focus on three main areas
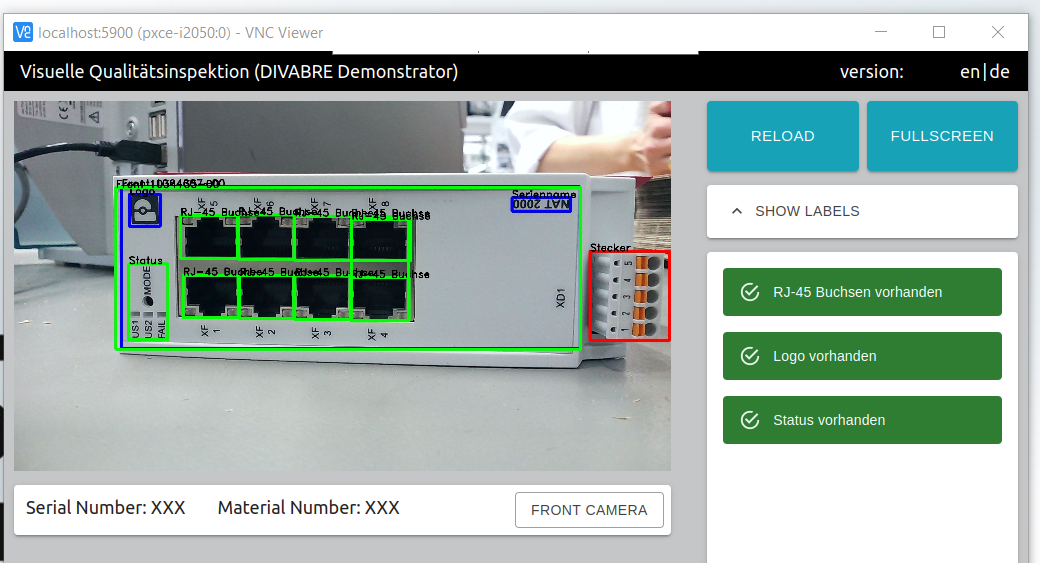
Image-based methods for the automation of quality controls and the precise localisation of anomalies and damage.
Sensor-based situation and condition assessment
Processing and utilisation of transient and seasonal sensor data for condition monitoring, anomaly detection and forecasting.
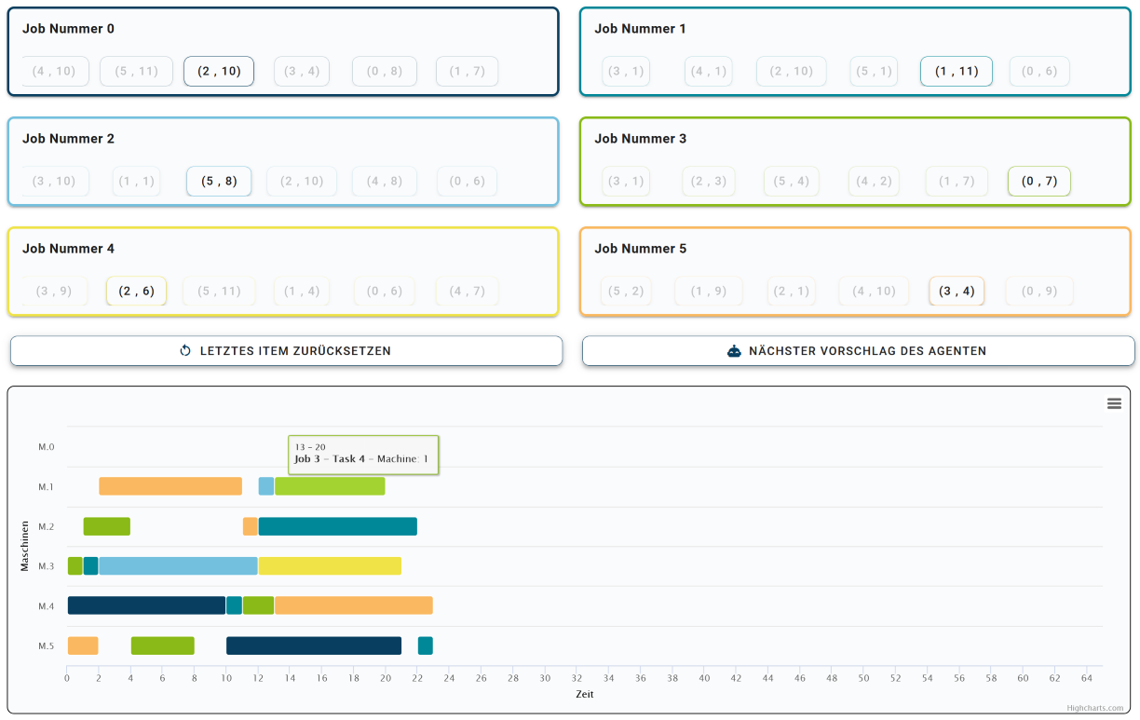
Intelligent planning and process design
Learning methods for solving complex planning and optimisation problems and for evaluating and parameterising processes.
Our research addresses a broad spectrum of deep learning technologies, including different learning paradigms such as supervised and reinforcement learning, learning scenarios such as transfer learning, representation learning and explainable AI, as well as model architectures such as transformer networks, autoencoders and generative adversarial networks.
We work closely with industry partners, whether as part of publicly funded projects or direct R&D contracts. In doing so, we deal intensively with real challenges and always take the needs of end users and technical experts into account. This practical orientation ensures that our research results are not only theoretically sound, but also directly applicable in industrial practice and improve value creation.
Selected publications
- 2018
- Meyes, R., Scheiderer, C., & Meisen, T. (2018). "Continuous Motion Planning for Industrial Robots based on Direct Sensory Input" , Procedia CIRP , 72 , 291—296.
- Meyes, R., Tercan, H., Thiele, T., Krämer, A., Heinisch, J., Liebenberg, M., Hirt, G., Hopmann, C., Lakemeyer, G., Meisen, T., & Jeschke, S. (2018). "Interdisciplinary Data Driven Production Process Analysis for the Internet of Production" , Procedia Manufacturing , 26 , 1065—1076.
- Haßler, M., Pomp, A., Kohlschein, C., & Meisen, T. (2018). "STIDes Revisited-Tackling Global Time Shifts and Scaling" , 2018 International Conference on Innovations in Information Technology (IIT) .
- Tercan, H., Guajardo, A., Heinisch, J., Thiele, T., Hopmann, C., & Meisen, T. (2018). "Transfer-Learning: Bridging the Gap between Real and Simulation Data for Machine Learning in Injection Molding" , Procedia CIRP , 72 , 185—190.
- 2017
- Tercan, H., Al-Khawli, T., Eppelt, U., Büscher, C., Meisen, T., & Jeschke, S. (2017). "Improving the Laser Cutting Process Design by Machine Learning Techniques" , Production Engineering , 11 (2), 195—203.
